Equilibrium
- A body which is not moving is in a state of equilibrium.
- A body is in a state of stable equilibrium when any small movement increases its potential energy so that when released it tends to resume its original position.
- A body is in a state of unstable equilibrium if, following any small movement, it tends to move away from its original position.
- The sum of reaction forces on a body is always equal to the sum of action forces if the body is in a state of equilibrium, regardless of the positions and magnitudes of the action forces.
- If a body is in an equilibrium state, all the moments acting on the body about any point should be zero.
Model Demonstrations
Action and Reaction Forces
This model demonstrates what has been shown in Example 1-1, namely:
- The sum of reaction forces is always equal to the external force, W, regardless of the location of the external force.
- When the external force, W, is placed above one of the two supports, the reaction force at that support is equal to the external force but acts in the opposite direction and there is no reaction force at the other support.



Fig. 1-3: Action and reaction
Fig. 1-3a shows a wooden beam supported by two scales, one at each end. The scales are adjusted to zero when the beam is in place. Locate a weight of 454 grams at three different positions on the beam and note the readings on the two scales. It can be seen that:
- For the three positions of the weight, the sum of the readings (reactions) from the two scales is always equal to the weight (the external force), see Fig. 1-3b.
- The readings on the scales have a linear relation to the distance between the locations of the supports and the weight. The closer the weight is to one of the scales, the larger the reading on the scale. An extreme case occurs when the weight is placed directly over the left hand scale. The reading on the left hand scale is the same as the weight and the reading on the other scale is zero (Fig. 1-3c).
Stable and unstable equilibrium
This model demonstration shows the difference between stable and unstable equilibrium.


Fig. 1-4: Stable and unstable equilibrium
The equilibrium of a ruler supported on two round pens (or roller supports) can be achieved easily as shown in Fig. 1-4a. However, supporting the ruler horizontally on a single round pen alone is very difficult, because the external force (self-weight) from the ruler and the reaction force from the round pen are difficult to align exactly. If the ruler achieves equilibrium on the single round pen, this type of equilibrium is unstable and is not maintained if a slight disturbance is applied to the ruler or to the round pen. The ruler will rotate around the point of contact with the pen until it finds another support (Fig. 1-4b).
A plate-bottle system
This model demonstration shows how an equilibrium state can be achieved.


Fig. 1-5: Equilibrium of a bottle and wood system
Fig. 1-4 shows that the ruler is in stable equilibrium when it has two round pen supports and becomes unstable equilibrium when it has only one round pen support. This however does not mean that a body placed on a single support cannot achieve a state of stable equilibrium.
Figure 1.5a shows a bottle of wine and a piece of wood with a hole. The bottle can be supported by the wood when the neck of the bottle is inserted into the hole to the maximum extent, and the two form a single wood-bottle system in equilibrium as shown in Fig. 1-5b.
The wood-bottle system, supported on the narrow wooden edge, is and feels very stable, because:
- The two external forces from the weights of the bottle and the wood are equal to the reaction force generated from the table;
- The sum of the moments of the two action forces about the point where the support force acts are equal to zero.
Another way of saying this is that the centre of mass of the wood and bottle system lies over the base of the wood.
A magnetic “float” model
The model demonstrates the effect of magnetic force although the force cannot be seen.


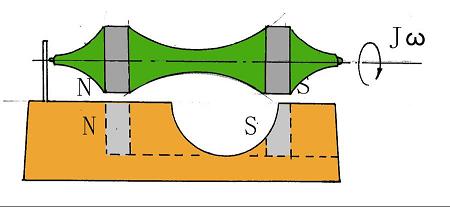

Fig. 1-6: A magnetic float model (Courtesy of Prof. B Zhuang, Zhejiang University, China)
Fig. 1-6 shows a model consisting of an axisymmetric body and a base unit. There are two magnetic rings in the axisymmetric body and two magnets in the base unit.
It appears surprising that the axisymmetric body can be in an equilibrium position when no vertical supports are provided. Where is the force that supports the weight of the axisymmetric body? When opposite poles of the magnets in the axisymmetric body and the base unit are the same, the body can be positioned above the base with no visible support (Figs. 1-6a and 1-6c). When the opposite poles are different, the body rests on the base (Figs. 1-6b and 1-6d). In both cases the external force is the weight of the body. In the first case the reaction forces are the magnetic forces that push the body away and up while in the second case the reaction forces are provided through the points of contact between the unit and the base.
When the free end of the body (Fig 1-6a) is twisted using the thumb and index finger, the body is able to rotate many times before stopping. This is because there is little friction between the rotating body and its lateral glass support.
Practical Examples
A barrier

Counter balanced barriers can be found in many places, such as the one shown in Fig. 1-7. The weight fixed to the shorter arm counter balances much of the weight of the barrier arm allowing the barrier to be opened easily with a relatively small downward force near the counter balance weight.
The barrier can be opened when the moment induced by the counter balance weight and the applied downward force is larger than the moment induced by the weight of the barrier about the support point.
A footbridge

The form of footbridge shown in Fig 1-8 is a development of the simple counter balanced barrier shown in Fig. 1-7.
The moment induced by the weight of the footbridge deck about the supporting points on the wooden frame is slightly larger than that induced by the balance weight, which is placed on and behind a wooden board. The addition of a small force, applied by pulling on a cable, causes the bridge to open.
An equilibrium kitchen scale

Fig.1-9 shows a kitchen scale that weighs an apple and a banana using the principle of equilibrium.
There is a pivot at the centre of the scale and a pair of arms can rotate about the pivot. The left and right arms are designed to be symmetrical about the central pivot. There are two other pivots at the ends of the left and right arms where two trays are placed. The two arms would be at the same level when an equilibrium state is achieved. The equilibrium equation for moment (the third equation in Eq. 1-1) can be used to give:
Weight of the fruits x dL = standard weights placed x dR
Where dL and dR are the distances between the central pivot and the left and right hand pivots of application of the weights. Due to the symmetry, dL = dR, the above equation thus states that the weight of the fruits is equal to the standard weights placed on the tray. The operation of the scale is thus based on the principle of equilibrium.
Magnetic float train

Fig. 1-11 shows the first commercial friction-free magnetic ‘float’ train, which operates between Shanghai City and Pudong Airport. The floating train can reach speeds in excess of 270mph. The train, with magnets under the cars, ‘floats’ above a sophisticated electromagnetic track in the same way that the axi-symmetric object ‘floats’ above the base unit in the demonstration in Section 1.3.4. The weight of the train (external force) is balanced by magnetic forces (reaction forces) generated between the magnets in the cars and the track. Since no friction is generated between the external and reaction forces, much smaller tractive forces are required to propel the train than would normally be the case.
Float trains have also run in the UK on a prototype route between Birmingham Airport and a nearby train station, but they were eventually abandoned in 1995 because of reliability problems.
A Dust Tray


Fig. 1-12: An application of inequilibrium
Equilibrium may also be found in several common items used in daily life. Fig. 1-12a shows a dust tray which is often used in fast food restaurants to collect rubbish from floors. When moving the dust tray between locations, one lifts the vertical handle. The tray then rotates through an angle such that the rubbish will be kept at the end of the tray as shown in Fig. 1-12.b. The rotation occurs because there is a pivot on the tray and the pivot is purposely placed at the position which will cause the tray to turn. Because the mass centre of the dust tray in its horizontal position is not in line with the handle, the tray rotates until this is the case. If the larger portion of the tray lies behind the handle, the direction of rotation is such that rubbish remains trapped during movement.
References
1.1 Hibbeler, R C, (2005), Mechanics of Materials, Sixth Edition, Prentice-Hall Inc, Singapore, ISBN 0-13-186-638-9.